Examples#
This section provides examples of how to build different learning-based MPC agents via
mpcrl.
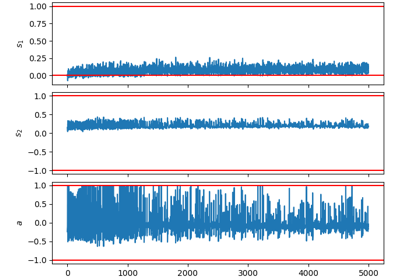
Gradient-based off-policy learning agents#
The following example showcases how to use gradient-based Reinforcement Learning techniques (in particular, Q-learning) to train a Model Predictive Controller (MPC) scheme for a simple task in an off-policy way.
Gradient-based on-policy learning agents#
The following examples showcase how to use gradient-based Reinforcement Learning techniques (in particular, Q-learning and Deterministic Policy Gradient) to train a Model Predictive Controller (MPC) scheme for a simple task in an on-policy fashion.

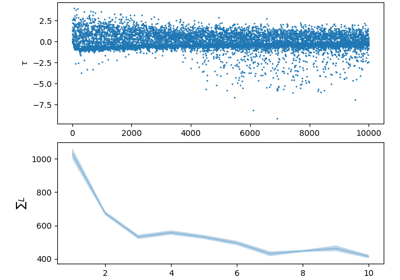
Gradient-free learning agents#
The example below demonstrates how to use gradient-free methodologies to find the optimal parametrization of an MPC controller.

Other examples#
Here we include other examples that are not (strictly) related to MPC and RL.


Adapative Cruise Control with Input Constrained Control Barrier Function