Other examples#
Here we include other examples that are not (strictly) related to MPC and RL.
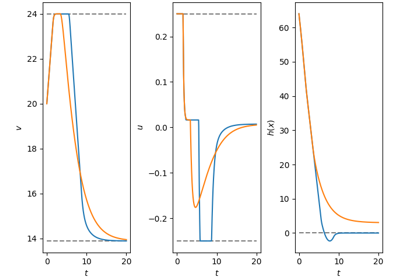
Adapative Cruise Control with Input Constrained Control Barrier Function
Adapative Cruise Control with Input Constrained Control Barrier Function
Here we include other examples that are not (strictly) related to MPC and RL.
Adapative Cruise Control with Input Constrained Control Barrier Function